Stereo Vision System on UGV
 3D obstacle detection and mapping
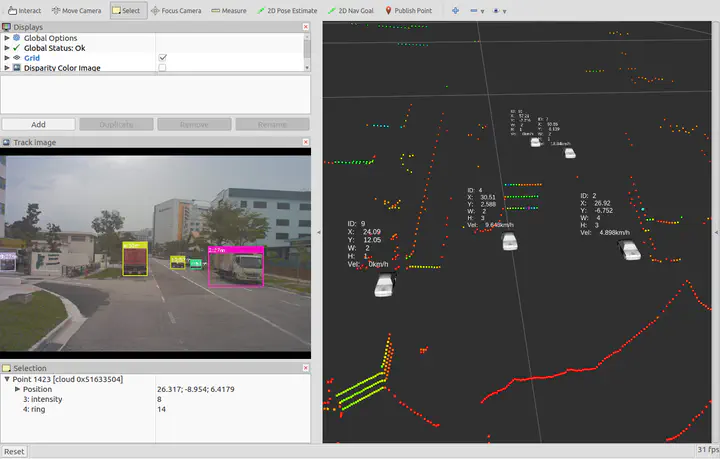
3D obstacle detection and mappingStereo Vision System on High Speed Unmanned Ground Vehicle
Purpose of this project to develop a stereo vision system to explore surroundings for obstacle detection, tracking and mapping; object classification; visual SLAM, road feature detection (like slope detection, curb detection and lane detection).
Please visit our project page for more details.